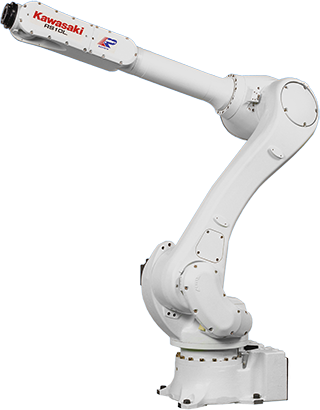
双手腕定位机器人
duAro1
双手腕定位机器人duAro
川崎机器人的革新突破——双手腕定位机器人诞生
duAro1
负载2kg (1手臂)
轴数4 × 2
重复性±0.05mm
duAro1机器人的规格
|
手臂形式
|
水平多关节
|
|
动作自由度(轴)
|
4x2手臂
|
|
最大可搬重量(kg)
|
2(1手臂)
|
|
重复定位精度(mm)
|
±0.05
|
|
最大行程
|
|
下手臂
|
上手臂
|
|
腕旋转(°)
|
-170 - +170 (JT1)
|
-510 - +150 (JT5)
|
|
腕旋转(°)
|
-140 - +140 (JT2)
|
-140 - +140 (JT6)
|
|
腕上下(mm)
|
0 - +150 (JT3)*1
|
0 - +150 (JT7)*1
|
|
手腕回转(°)
|
-360 - +360 (JT4)*1
|
-360 - +360 (JT8)*1
|
|
控制柜部分(D61)
|
控制轴数(轴)
|
最大12
|
|
驱动方式
|
全数字伺服系统
|
|
动作方式
|
示教模式
|
各轴独立、基础坐标系、工具坐标系
|
|
再现模式
|
各轴插补、直线插补
|
|
示教方式
|
AS语言方式、直接示教
|
|
存储容量(MB)
|
4
|
|
I/O信号
|
通用输入(点)
|
16(最大32)*2
|
|
通用输出(点)
|
8(最大16)*2
|
|
电源规格
|
AC200-230V±10%、50/60Hz±2%、单相、最大2.0kVA
|
|
D种接地(机器人专用接地)、最大漏电电流10mA以下
|
|
本体重量(kg)
|
200
|
|
安装方式
|
地面式
|
|
安装环境
|
环境温度(℃)
|
5 - 40
|
|
相对湿度(%)
|
35 - 85(无结露)
|
*1: 采用标准选件手臂上下轴、手腕旋转轴时。选件变更或客户自行转换后的尺寸将有所变化。
*2:选件